Explicit 5/4 pair, also with 3rd, 2nd, and 1st order embedded methods, from Cash & Karp. More...
#include <ode_rkck.h>
Public Member Functions | |
| OdeRKCK (unsigned long neq) | |
| constructs | |
 Public Member Functions inherited from ode::OdeEmbedded Public Member Functions inherited from ode::OdeEmbedded | |
| OdeEmbedded (unsigned long neq, bool need_jac, int lowerord) | |
| constructs | |
| virtual | ~OdeEmbedded () |
| destructs | |
| double | get_facsafe () |
| gets safety factor applied to time step selection | |
| double | get_facmin () |
| gets minimum allowable fraction change in time step (a number <1) | |
| double | get_facmax () |
| gets maximum allowable fraction change in time step (a number >1) | |
| void | set_facsafe (double facsafe) |
| sets safety factor applied to time step selection | |
| void | set_facmin (double facmin) |
| sets minimum allowable fraction change in time step (a number <1) | |
| void | set_facmax (double facmax) |
| sets maximum allowable fraction change in time step (a number >1) | |
| Public Member Functions inherited from ode::OdeAdaptive | |
| OdeAdaptive (unsigned long neq, bool need_jac) | |
| constructs | |
| virtual | ~OdeAdaptive () |
| destructs | |
| long unsigned | get_nrej () |
| gets the count of rejected steps | |
| double | get_abstol () |
| gets the absolute error tolerance | |
| double | get_reltol () |
| gets the relative error tolerance | |
| double | get_dtmax () |
| gets the maximum allowable time step | |
| void | set_abstol (double tol) |
| sets the absolute error tolerance | |
| void | set_reltol (double tol) |
| sets the relative error tolerance | |
| void | set_tol (double tol) |
| sets the absolute and relative error tolerance to the same value | |
| void | set_dtmax (double dtmax) |
| sets the maximum allowable time step | |
| void | solve_adaptive (double tint, double dt0, bool extras=true) |
| integrates for a specified duration of independent variable without output | |
| void | solve_adaptive (double tint, double dt0, const char *dirout, int inter) |
| lots of output, solves and stores every "inter" point along the way | |
| void | solve_adaptive (double tint, double dt0, unsigned long nsnap, const char *dirout) |
| solves and writes evenly spaced snapshots | |
| void | solve_adaptive (double dt0, double *tsnap, unsigned long nsnap, const char *dirout) |
| solves and writes snapshots at times specified in the tsnap array | |
| Public Member Functions inherited from ode::OdeBase | |
| OdeBase (unsigned long neq, bool need_jac) | |
| constructs | |
| virtual | ~OdeBase () |
| destructs | |
| const char * | get_name () |
| gets the name of the ODE system | |
| const char * | get_method () |
| gets the name of the solver/method | |
| const char * | get_dirout () |
| gets output directory string if one has been set | |
| bool | get_quiet () |
| gets the boolean determining if updates are printed during solves | |
| bool | get_silent_snap () |
| gets whether to skip writing the solution vector to file when snapping | |
| unsigned long | get_neq () |
| gets the size of the ODE system | |
| double | get_t () |
| gets the current value of the independent variable | |
| double | get_dt () |
| gets the most recent or current time step size | |
| double * | get_sol () |
| gets a pointer to the whole solution array | |
| double | get_sol (unsigned long i) |
| gets an element of the solution array | |
| long unsigned | get_nstep () |
| gets the total number of steps taken | |
| long unsigned | get_neval () |
| gets the total number of ODE system evaluation | |
| long unsigned | get_icheck () |
| gets the number of steps after which the solution is checked for integrity | |
| long unsigned | get_nJac () |
| gets the total number of Jacobian evaluations performed | |
| void | set_t (double t) |
| sets the "time," or independent variable used to track progress | |
| void | set_sol (unsigned long i, double x) |
| sets an element of the solution array | |
| void | set_sol (double *sol) |
| copies an array into the solution array | |
| void | set_name (std::string name) |
| sets the name of the ODE system | |
| void | set_name (const char *name) |
| sets the name of the ODE system | |
| void | set_quiet (bool quiet) |
| sets the boolean determining if updates are printed during solves | |
| void | set_silent_snap (bool silent_snap) |
| sets whether to skip writing the solution vector to file when snapping | |
| void | set_icheck (unsigned long icheck) |
| sets the number of steps after which the solution is checked for integrity | |
| void | step (double dt, bool extra=true) |
| increments the step counter and the time, checks the solution integrity if needed, stores the time step in the object, and executes after_step() if extra is true | |
| void | solve_fixed (double tint, double dt, bool extras=true) |
| integrates for a specified duration of independent variable without output | |
| void | solve_fixed (double tint, double dt, const char *dirout, int inter=1) |
| lots of output, solves and stores every "inter" point along the way | |
| void | solve_fixed (double tint, double dt, unsigned long nsnap, const char *dirout) |
| solves and writes evenly spaced snapshots | |
| void | solve_fixed (double dt, double *tsnap, unsigned long nsnap, const char *dirout) |
| solves and writes snapshots at times specified in the tsnap array | |
| void | reset (double t, double *sol) |
| reset to a specified time and initial condition array | |
Additional Inherited Members | |
| Protected Member Functions inherited from ode::OdeEmbedded | |
| double | error (double abstol, double reltol) |
| calculates error estimate with lower and higher order solutions | |
| double | facopt (double err) |
| calculates factor for "optimal" next time step | |
| virtual void | adapt (double abstol, double reltol) |
| does the calculations to determine isrej and dtopt | |
| virtual bool | is_rejected () |
| simply returns isrej | |
| virtual double | dt_adapt () |
| simply returns dtopt | |
| Protected Member Functions inherited from ode::OdeAdaptive | |
| void | solve_adaptive_ (double tint, double dt0, bool extra=true) |
| integrates without output or any counters, trackers, extra functions... | |
| bool | solve_done_adaptive (double tend) |
| determines whether an adaptive solve is finished | |
| bool | step_adaptive_ (double dt, bool extra=true) |
| executes a single time and calls all necessary adapting functions | |
| double | dt_adapt_ (double tend) |
| wrapper around dt_adapt() to perform additional checks | |
| Protected Member Functions inherited from ode::OdeBase | |
| void | solve_fixed_ (double tint, double dt, bool extra=true) |
| integrates without output or any counters, trackers, extra functions... | |
| virtual void | ode_fun (double *solin, double *fout)=0 |
| evaluates the system of ODEs in autonomous form and must be defined by a derived class | |
| virtual void | ode_jac (double *solin, double **Jout) |
| evaluates the system's Jacobian matrix, also in autonomous form, and can either be defined in a derived class or left to numerical approximation | |
| void | ode_fun_ (double *solin, double *fout) |
| wrapper, calls ode_fun() and increases the neval counter by one | |
| void | ode_jac_ (double *solin, double **Jout) |
| wrapper, calls ode_jac() and increments nJac; | |
| virtual void | before_solve () |
| does any extra stuff before starting a solve | |
| virtual void | after_step (double t) |
| does any extra stuff after each step | |
| virtual void | after_capture (double t) |
| does any extra stuff only when a step is captured | |
| virtual void | after_snap (std::string dirout, long isnap, double t) |
| does any extra stuff after each snap | |
| virtual void | after_solve () |
| does any extra stuff after completing a solve | |
| void | snap (std::string dirout, long isnap, double tsnap) |
| writes the current value of the solution to a binary file | |
| bool | solve_done (double dt, double tend) |
| checks if the solution is within a single time step of the end point | |
| void | check_sol_integrity () |
| checks solution for nans and infs, exiting the program if they're found | |
| void | check_pre_solve (double tint, double dt) |
| checks that a solve can be performed with given tend and dt values | |
| void | check_pre_snaps (double dt, double *tsnap, unsigned long nsnap) |
| checks that snap times are monotonically increasing and > current time | |
| Protected Attributes inherited from ode::OdeEmbedded | |
| double | facsafe_ |
| safety factor applied to time step selection | |
| double | facmin_ |
| minimum allowable fraction change in time step | |
| double | facmax_ |
| maximum allowable fraction change in time step | |
| double * | solemb_ |
| embedded solution array | |
| Protected Attributes inherited from ode::OdeAdaptive | |
| long unsigned | nrej_ |
| counter for rejected steps | |
| double | abstol_ |
| absolute error tolerance | |
| double | reltol_ |
| absolute error tolerance | |
| double | dtmax_ |
| maximum allowable time step | |
| Protected Attributes inherited from ode::OdeBase | |
| std::string | name_ |
| the "name" of the system, which is used for output | |
| std::string | method_ |
| the "name" of the solver/method, as in "Euler" or "RK4" | |
| std::string | dirout_ |
| output directory if one is being used by a solver | |
| bool | quiet_ |
| whether stuff should be printed during a solve | |
| bool | silent_snap_ |
| whether to skip writing the solution vector to file when snapping but still execute after_snap() | |
| unsigned long | neq_ |
| number of equations in the system of ODEs | |
| double | t_ |
| time, initialized to zero | |
| double | dt_ |
| time step is stored and updated during solves | |
| double * | sol_ |
| array for the solution, changing over time | |
| long unsigned | nstep_ |
| number of time steps | |
| long unsigned | neval_ |
| function evaluation counter, must be incremented in step() when defined | |
| long unsigned | icheck_ |
| interval of steps after which to check for nans and infs (zero to ignore) | |
| double ** | Jac_ |
| storage for the ODE system's Jacobian matrix, only allocated for the methods that need it | |
| long unsigned | nJac_ |
| counter for jacobian evaluations | |
| double | absjacdel_ |
| absolute adjustment fraction for numerical Jacobian, if needed | |
| double | reljacdel_ |
| relative adjustment fraction for numerical Jacobian, if needed | |
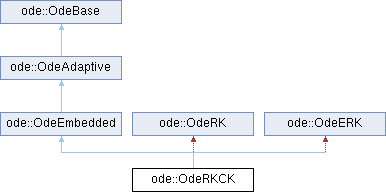
Detailed Description
Explicit 5/4 pair, also with 3rd, 2nd, and 1st order embedded methods, from Cash & Karp.
This class implements a 5th order method developed by Cash and Karp (reference below) which includes embeddes solutions of order 1, 2, 3, and 4. It's a complete family of solutions up to order 5. The lower order solutions can be used to vary the solution's order and control the step size in sophisticated ways, canceling a step early if the error estimate is large. The fact that function evaluations are made fairly evenly through the interval of a time step is also advantageous for surveying potential trouble and controlling the step.
So far, the sophisticated time stepping is not implemented, so this solver simply uses the 4th and 5th order solutions for adaptation.
+ J. R. Cash, A. H. Karp. "A variable order Runge-Kutta method for initial value problems with rapidly varying right-hand sides", ACM Transactions on Mathematical Software 16: 201-222, 1990. doi:10.1145/79505.79507 + https://en.wikipedia.org/wiki/Cash%E2%80%93Karp_method
Definition at line 21 of file ode_rkck.h.
Constructor & Destructor Documentation
◆ OdeRKCK()
| ode::OdeRKCK::OdeRKCK | ( | unsigned long | neq | ) |
The documentation for this class was generated from the following files:
- include/ode/ode_rkck.h
- src/ode_rkck.cc